
定义:在规定温度区间内(如 - 40℃~85℃),传感器无负载时,零点输出随温度变化的最大偏移量范围,反映温度对 “测量基准” 的整体影响;
量化方式:通常以 “满量程输出的百分比(% FSO)” 或 “绝对信号值(mV/μV)” 表示,例如 “零点温度漂移范围 ±0.05% FSO(-40℃~85℃)”,意味着在该温度区间内,零点输出的最大偏移不会超过满量程输出的 ±0.05%;
示例:100N 量程传感器,满量程输出(FSO)=200mV,零点温度漂移范围 ±0.05% FSO,则在 - 40℃~85℃内,零点输出的最大偏移量 = 200mV×±0.05%=±0.1mV,对应零负载时的最大虚假力值 =(±0.1mV / 2mV/N)=±0.05N(灵敏度 = 2mV/N)。
定义:在规定温度区间内,传感器的灵敏度(输出信号变化量 / 输入力变化量)随温度变化的最大偏移量范围,反映温度对 “力 - 信号转换系数” 的整体影响;
量化方式:同样以 “满量程输出的百分比(% FSO)” 或 “相对灵敏度的百分比(% S)” 表示,例如 “灵敏度温度漂移范围 ±0.1% S(-40℃~85℃)”,意味着在该温度区间内,灵敏度的最大偏移不会超过常温灵敏度的 ±0.1%;
示例:上述 100N 传感器常温灵敏度 = 2mV/N,灵敏度温度漂移范围 ±0.1% S,则在 - 40℃~85℃内,灵敏度的最大偏移量 = 2mV/N×±0.1%=±0.002mV/N,测量 100N 力时的最大信号偏差 = 100N×±0.002mV/N=±0.2mV,对应力值偏差 =±0.2mV / 2mV/N=±0.1N。
弹性体材料:弹性体的弹性模量温度系数、线膨胀系数是关键 —— 例如钛合金(弹性模量温度系数 - 0.01%/℃)比普通合金钢(-0.03%/℃)更稳定,在相同温度区间内,灵敏度漂移范围可缩小 2/3(如从 ±0.3% FSO 降至 ±0.1% FSO);
应变片类型:温度自补偿型应变片(如铜镍锰合金)的热输出≤±5με/℃,远低于普通应变片(±20με/℃),可大幅缩小零点漂移范围(如从 ±0.2% FSO 降至 ±0.05% FSO);
电路元件:低温漂运算放大器(如 ADI 的 AD8628,失调电压温漂≤0.5μV/℃)、高精度基准电源(如 TI 的 REF5050,温漂≤1ppm/℃),可减少电路自身的温度漂移,进一步缩小整体漂移范围。
补偿方式:宽范围多点点补偿(如 - 40℃、0℃、25℃、60℃、85℃五点补偿)比单点补偿(仅 20℃)的漂移范围更小 —— 单点补偿在偏离补偿点时漂移显著增大,而多点点补偿通过拟合模型,可确保全区间内漂移稳定(如 ±0.05% FSO);
补偿精度:使用高精度校准设备(如高低温箱控温精度 ±0.1℃、标准力源精度 ±0.01%),能更准确地建立 “温度 - 误差” 模型,使补偿后的漂移范围更接近理论值;若校准设备精度不足(如控温 ±2℃),会导致补偿模型偏差,漂移范围扩大。
应力分布均匀性:通过有限元分析(FEA)优化弹性体结构(如增加过渡圆角、设计等应力梁),可减少温度变化时的局部应力集中,避免局部形变过大导致的漂移范围扩大;
热传导对称性:弹性体设计为对称结构(如对称梁、对称柱),可确保温度变化时热胀冷缩均匀,减少因热变形不对称导致的附加漂移,缩小零点漂移范围。
若实际工作温度在传感器的 “补偿温度区间” 内(如设备工作 - 30℃~70℃,传感器补偿温度 - 40℃~85℃),则直接参考补偿温度对应的漂移范围(如 ±0.05% FSO),可满足精度要求;
若实际工作温度超出补偿温度区间(如设备工作 - 50℃~90℃,传感器补偿温度 - 40℃~85℃),则需关注工作温度对应的漂移范围(如 ±0.5% FSO),评估是否在可接受误差内,或选择补偿温度更宽的传感器。
若应用要求全温度区间内的最大测量误差≤0.1% FSO(如精密力控制),则需选择温度漂移范围≤±0.05% FSO 的传感器(预留一半误差余量,避免其他误差叠加);
若应用对精度要求较低(如普通力监测,误差≤1% FSO),则可选择漂移范围≤±0.5% FSO 的传感器,降低成本。
部分传感器会分别标注 “零点温度漂移范围” 和 “灵敏度温度漂移范围”(如 “零点 ±0.05% FSO,灵敏度 ±0.1% FSO,-40℃~85℃”),可更精准地评估两类误差的叠加影响;
若仅标注 “温度漂移范围”(未区分零点 / 灵敏度),需确认其是否为 “最大漂移范围”(即零点和灵敏度漂移中的最大值),避免低估误差。
设备准备:高精度高低温箱(控温精度 ±0.1℃)、标准力源(精度 ±0.01%)、24 位数据采集器;
温度点设置:在传感器标注的漂移范围对应的温度区间内,均匀选取 5-7 个温度点(如 - 40℃、-20℃、0℃、25℃、50℃、70℃、85℃);
数据采集:
零点漂移:每个温度点保温 30 分钟(待传感器热稳定),采集无负载时的零点输出;
灵敏度漂移:每个温度点施加 30%、50%、100% 满量程力,采集输出信号并计算灵敏度;
计算漂移范围:找出所有温度点中零点输出的最大偏移量(相对于 25℃零点)和灵敏度的最大偏移量(相对于 25℃灵敏度),与传感器标注的漂移范围对比,判断是否达标。




邮件:QY258@hiremoonai.com
联系电话:13821135059
生产地址:浙江省杭州市余杭区经济开发区仁和街道洛阳路1号
销售 :天津供销集团国际汽配城东区9号楼2-3号1-3层

扫码联系我们
 信息
信息 公司简介
公司简介 关于我们
关于我们 加入我们
加入我们 联系我们
联系我们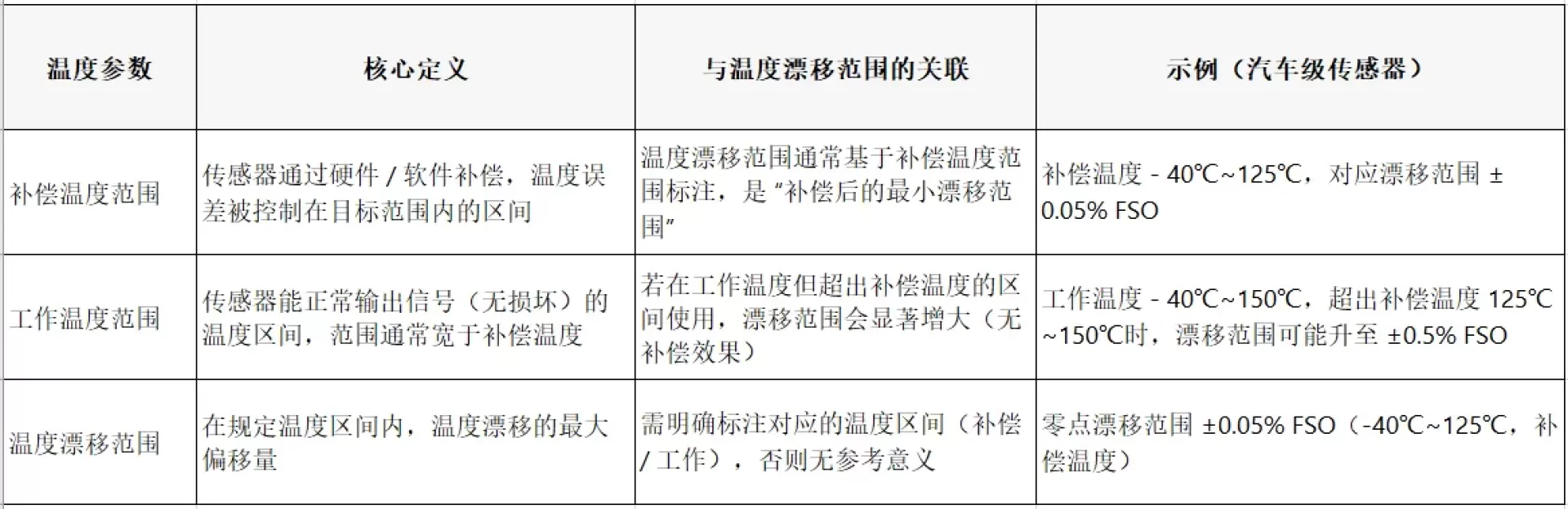 简言之:
简言之: