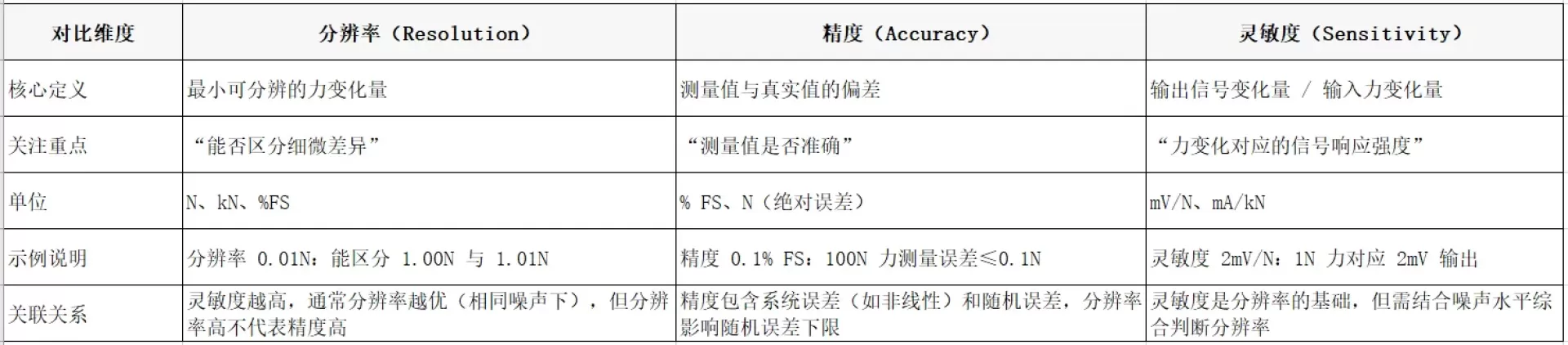
绝对分辨率:以具体力值单位(如 N、kN、g 力)表示的最小可分辨力变化,例如分辨率 0.01N,意味着传感器能区分 1.00N 和 1.01N 的力值差异。
相对分辨率:以额定量程的百分比(% FS)表示的分辨率,例如 100N 量程传感器的相对分辨率为 0.01% FS,其绝对分辨率为 100N×0.01% = 0.01N。
通常产品手册会同时标注两种分辨率,绝对分辨率更直观用于实际测量,相对分辨率便于跨量程对比传感器的精细度。
应变片的感知极限:应变片的敏感栅存在 “最小可感知应变”(通常为 1με,即 10⁻⁶的形变),对应到力值即为 “最小可分辨力”—— 例如弹性体应变系数为 1με/N 的传感器,应变片的感知极限决定其分辨率下限为 1N(忽略噪声时);
弹性体的刚度:弹性体刚度越大(相同力下形变越小),微小力对应的形变量越小,应变片越难感知,分辨率越差;反之刚度越小(如微小力传感器的弹性体较薄),分辨率越优;
电路噪声:传感器信号调理电路(如放大器、ADC)存在固有噪声(如热噪声、量化噪声),若噪声信号幅度大于微小力对应的输出信号,会掩盖微小力的信号变化,导致无法分辨 —— 例如电路噪声为 0.1mV,传感器灵敏度 2mV/N,则最小可分辨力为 0.05N(0.1mV / 2mV/N),即分辨率受限于 0.05N。
滤波算法:若未对输出信号进行滤波,环境干扰噪声(如电磁干扰、振动)会叠加在有效信号上,增大噪声幅度,降低分辨率;通过低通滤波器、卡尔曼滤波等算法抑制噪声,可显著提升分辨率(如将噪声从 0.1mV 降至 0.01mV,分辨率从 0.05N 提升至 0.005N);
ADC 采样精度:模数转换器(ADC)的位数决定了信号的量化精度 —— 例如 12 位 ADC 的量化间隔为 “满量程电压 / 4096”,若满量程电压 10V,量化间隔约 2.44mV;若传感器灵敏度 2mV/N,量化间隔对应 1.22N 的力变化,即 ADC 分辨率直接限制传感器的力分辨率,需选用高位数 ADC(如 24 位)提升量化精度。
振动干扰:环境振动会使弹性体产生微小的动态形变,叠加在静态力形变上,形成 “振动噪声”,若振动幅度大于微小力对应的形变量,会导致分辨率下降 —— 例如振动导致 0.02N 的等效力波动,会使 0.01N 的分辨率无法实现;
电磁干扰(EMI):工业环境中的电机、变频器会产生电磁辐射,干扰传感器的弱信号(通常为 mV 级),增大信号噪声,降低分辨率;
温度波动:温度微小波动会导致弹性体热胀冷缩、应变片电阻漂移,产生 “温度噪声”,尤其在高精度分辨率场景(如 0.001N)中,±0.1℃的温度波动就可能影响分辨率。
微小力测量:如生物力学测试(细胞按压、手指触觉力,需分辨率 0.001N~0.01N)、半导体芯片键合力检测(需分辨率 0.0001N~0.001N)、MEMS 器件力校准(需分辨率 0.00001N);
精密装配力控制:如电子元件焊接力控制(需分辨 0.01N 的力变化,避免虚焊或焊盘损坏)、镜头模组组装(需分辨率 0.005N,确保光学对齐)。
工业称重 / 压力监测:如料罐称重(需分辨率 0.1N~1N,满足配料精度)、液压系统压力转换为力测量(需分辨率 1N~10N,满足控制需求);
结构力学测试:如桥梁、建筑构件的力监测(需分辨率 10N~100N,关注宏观力变化)。
分辨率≤最小需测力变化的 1/5~1/10:例如需测量 0.1N 的力变化,应选择分辨率≤0.02N 的传感器,避免因分辨率不足导致无法捕捉关键力波动;
结合量程选择:同类型传感器,量程越小通常分辨率越优(如 10N 量程传感器分辨率 0.001N,100N 量程同类型传感器分辨率 0.01N),需根据实际测力范围选择合适量程,兼顾分辨率和量程需求;
考虑环境噪声:恶劣环境(如振动、强电磁干扰)中,需选择分辨率比理论需求高 1~2 个数量级的传感器,或通过滤波、屏蔽措施抑制噪声,确保实际应用中分辨率达标。
选用高灵敏度传感器:在相同噪声水平下,灵敏度越高(如 5mV/N vs 2mV/N),相同力变化对应的输出信号越强,越容易区分微小力变化,分辨率越优;
降低电路噪声:选用低噪声运算放大器(如 ADI 的 AD8628,输入噪声电压≤1nV/√Hz)、高精度 ADC(如 24 位 Σ-Δ 型 ADC),优化 PCB 布线(如缩短信号路径、增加接地屏蔽),减少电路固有噪声;
优化弹性体设计:对微小力传感器,采用低刚度弹性体(如薄梁结构、柔性材料),增大微小力对应的形变量,提升应变片的感知能力。
添加滤波算法:在数据采集系统中加入低通滤波器(如截止频率 0.1Hz~1Hz),抑制高频振动噪声;采用滑动平均、指数平滑等算法,降低随机噪声对输出信号的影响;
提高采样频率与平均次数:增加 ADC 的采样频率(如从 100Hz 提升至 1000Hz),并对多次采样结果取平均值(如 100 次平均),可有效降低量化噪声和随机噪声,提升分辨率(平均次数越多,噪声抑制效果越好,但响应速度会降低);
环境噪声抑制:为传感器加装隔振装置(如橡胶减震垫、空气弹簧),减少振动干扰;使用金属屏蔽壳包裹传感器和信号线缆,抑制电磁干扰;在温度敏感场景中,采用恒温箱或温度补偿算法,降低温度噪声。




邮件:QY258@hiremoonai.com
联系电话:13821135059
生产地址:浙江省杭州市余杭区经济开发区仁和街道洛阳路1号
销售 :天津供销集团国际汽配城东区9号楼2-3号1-3层

扫码联系我们
 信息
信息 公司简介
公司简介 关于我们
关于我们 加入我们
加入我们 联系我们
联系我们