修正非线性误差:传感器实际输出与理想线性输出的偏差(非线性误差)在不同量程段可能不同,5 点校准能捕捉低、中、高量程的偏差,通过曲线拟合(如线性、二次多项式拟合)修正,比 3 点校准更精准。
验证滞后误差:校准过程通常包含 “加载”(从 0→100% 量程)和 “卸载”(从 100%→0 量程)两个阶段,5 点校准可记录每个点加载与卸载的输出差异,评估滞后误差是否在允许范围内(如≤0.1% FS)。
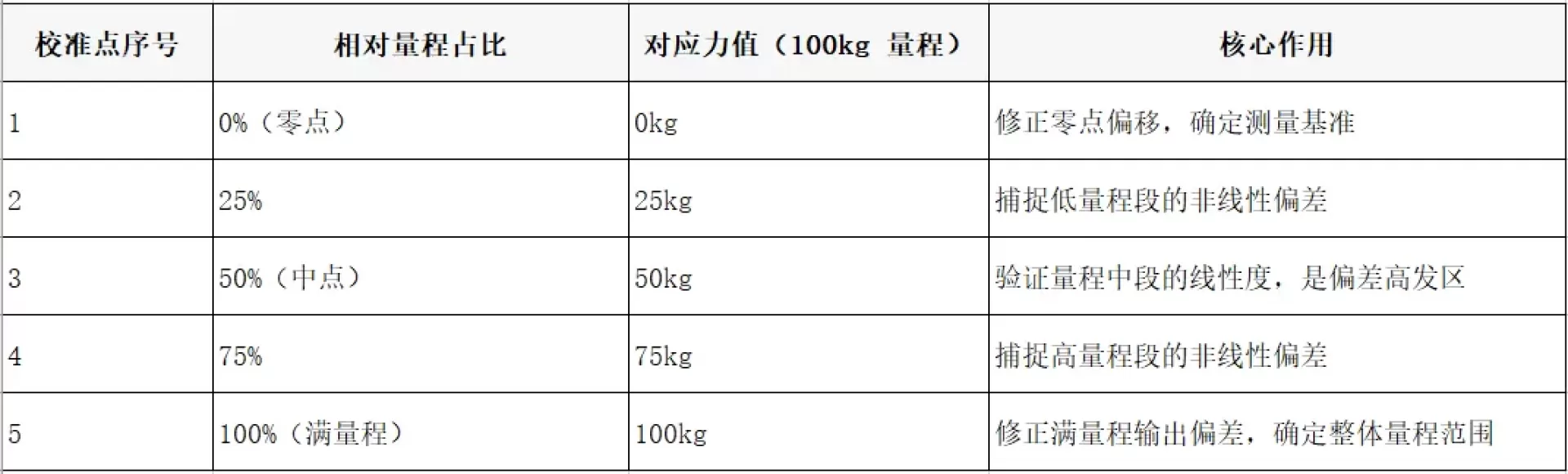
确保全量程精度:部分传感器在低量程(如 0-20%)或高量程(如 80%-100%)可能出现明显偏差(如弹性体形变不均),5 点校准能覆盖这些区间,避免因仅校准两点导致局部量程精度不达标。
建立校准模型:通过 5 个点的 “标准力 - 实际输出” 数据,可建立传感器的校准模型(如输出电压 = 灵敏度 × 力值 + 零点偏移),后续使用时,将实时输出代入模型即可得到修正后的真实力值,消除系统误差。
将传感器安装在专用校准工装(如刚性底座)上,确保受力均匀,无额外弯矩或偏心力;
连接信号调理器和数据采集器,预热 30 分钟(使传感器和电路达到热稳定),记录初始零点输出。
按 “0%→25%→50%→75%→100%” 的顺序,依次施加标准力,每个力值保持稳定(通常 3-5 秒,避免动态冲击);
记录每个点的标准力值(如 25kg)和对应的传感器输出信号(如 50mV),重复加载 2-3 次,取平均值减少随机误差。
按 “100%→75%→50%→25%→0%” 的顺序,依次卸载标准力,每个力值同样保持稳定;
记录每个点的卸载输出信号(如卸载到 25kg 时输出 49.8mV),用于计算滞后误差(加载输出 - 卸载输出)。
根据加载数据,用 “最佳拟合直线法” 或 “端点连线法” 计算非线性误差(各点输出与理想直线的最大偏差 / 满量程输出 ×100%);
计算滞后误差(同一力值加载与卸载的最大输出差 / 满量程输出 ×100%);
若误差超出允许范围(如工业级传感器通常要求≤0.1% FS),需调整传感器(如微调电路零点、重新粘贴应变片)后重新校准。
将 5 个点的校准数据存入称重仪表或数据采集系统,建立 “力值 - 输出” 的对应关系;
后续测量时,系统会根据实时输出信号,通过插值法(如线性插值)计算出修正后的真实力值,确保全量程精度。
避免偏载:校准过程中,标准力必须垂直作用于传感器受力中心,若存在偏载(力的作用点偏移),会引入额外误差,导致校准结果失真;
环境稳定:温度、湿度波动会影响传感器零点和灵敏度,校准前需确保环境参数稳定,且传感器已适应环境(预热足够时间);
设备精度:标准力源(如砝码)的精度需至少比传感器高 3 个等级(如校准 0.1 级传感器,需用 0.03 级标准砝码),避免因标准设备精度不足导致校准偏差;
定期复校:传感器使用过程中,因弹性体老化、应变片性能衰减等,精度会逐渐下降,需定期(如每 6 个月 - 1 年)进行 5 点复校,确保测量可靠性。




邮件:QY258@hiremoonai.com
联系电话:13821135059
生产地址:浙江省杭州市余杭区经济开发区仁和街道洛阳路1号
销售 :天津供销集团国际汽配城东区9号楼2-3号1-3层

扫码联系我们
 信息
信息 公司简介
公司简介 关于我们
关于我们 加入我们
加入我们 联系我们
联系我们